میکرورباتها پتانسیل ایجاد انقلاب در پزشکی را دارند. محققان مرکز سیستمهای یادگیری ETH در ماکس پلانک به تازگی روشی برای تصویربرداری ارائه کردهاند که با استفاده از آن، میتوان میکرورباتهایی با اندازه سلول را به صورت جداگانه و با وضوح بالا در یک موجود زنده تشخیص داد.
استفاده از نانولیپوزوم برای تصویربرداری از میکرورباتها در بدن
چگونه میتوان لخته خون را بدون هیچ جراحی از مغز خارج کرد؟ چگونه میتوان دارو را دقیقاً به اندام بیمار که دسترسی به آن دشوار است، رساند؟
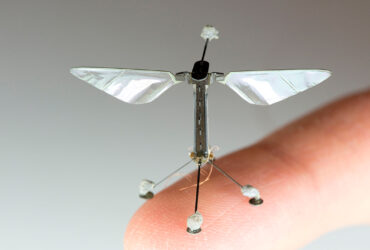
اینها تنها دو نمونه از نوآوریهای بیشماری است که توسط محققان در زمینه میکرورباتیک پزشکی پیشبینی شده است. رباتهای کوچک قول میدهند که درمانهای پزشکی آینده را اساساً تغییر دهند: روزی میتوانند از طریق عروق بیمار حرکت کرده تا عامل بیماری را از بین ببرند، با عفونتها مبارزه کنند یا اطلاعات تشخیصی دقیق را بهطور کاملا غیرتهاجمی ارائه کنند. محققان استدلال میکنند، سیستم گردش خون ممکن است بهعنوان یک مسیر تحویل ایده آل برای میکرورباتها عمل کند، زیرا به تمام اندامها و بافتهای بدن میرسد.
برای اینکه چنین میکرورباتهایی بتوانند مداخلات پزشکی مورد نظر را به صورت ایمن و قابل اطمینان انجام دهند، نباید بزرگتر از یک سلول زیستی باشند. در انسان، سلول دارای قطر متوسط ۲۵ میکرومتر است. کوچکترین رگهای خونی انسان، مویرگها، حتی نازکتر هستند: متوسط قطر آنها فقط ۸ میکرومتر است. اگر میخواهند بدون مانع از کوچکترین رگهای خونی عبور کنند، میکرورباتها باید به همان نسبت کوچک باشند. با این حال، چنین اندازه کوچکی آنها را با چشم غیرمسلح نامرئی میکند – و علم نیز هنوز راه حلی فنی برای شناسایی و ردیابی رباتهای به اندازه میکرون به صورت جداگانه پیدا نکرده است.
پاول ورد، دانشجوی دکترا در مرکز سیستمهای یادگیری ETH میگوید: «پیش از اینکه این سناریوی به واقعیت تبدیل شود و میکرورباتها واقعاً در انسانها استفاده شوند، تجسم و ردیابی دقیق این ماشینهای کوچک کاملاً ضروری است.»
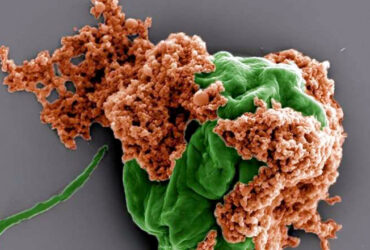
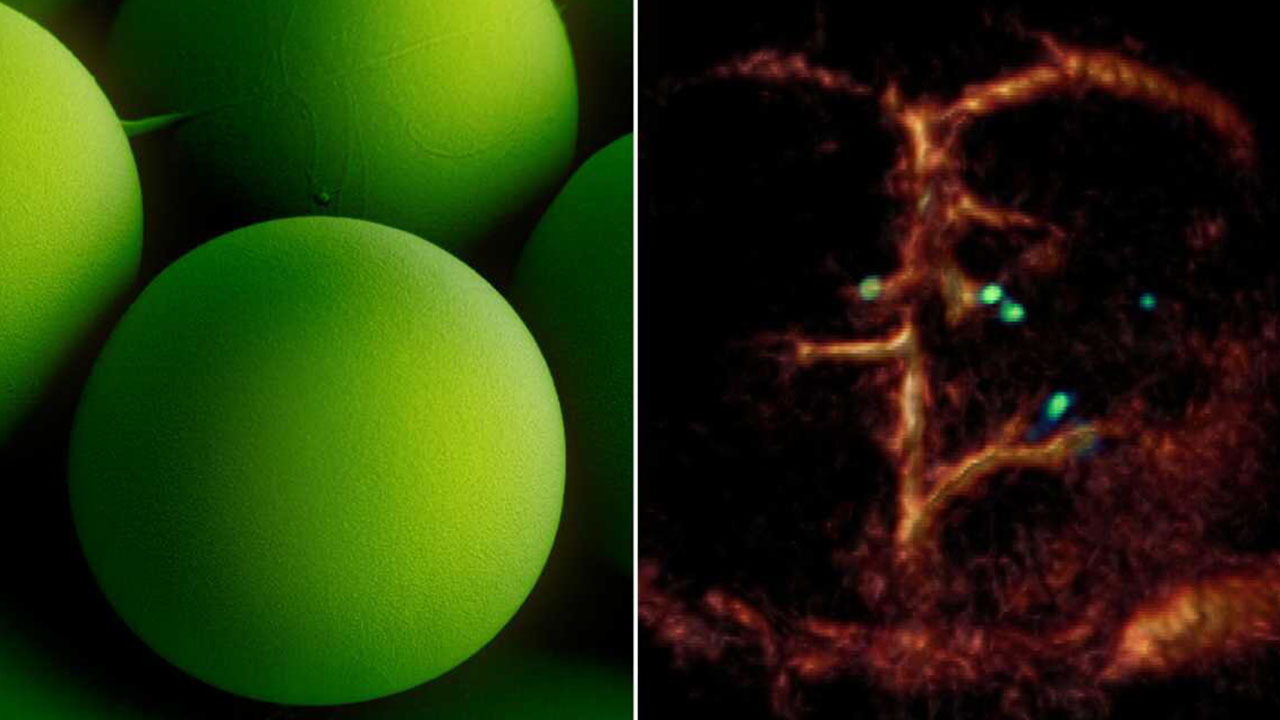
پژوهشگران این پروژه میکرورباتیک و تصویربرداری را با هم ادغام کردند. این گروه تحقیقاتی برای اولین بار موفق شدند با استفاده از یک روش تصویربرداری غیرتهاجمی، رباتهای کوچکی به اندازه پنج میکرومتر را در زمان واقعی در عروق مغزی موشها شناسایی و ردیابی کنند. میکرورباتهای کروی از ذرات مبتنی بر سیلیس تشکیل شدهاند و نیمی از آن با نیکل (نیکل) و نیمی با طلا (Au) پوشانده شدهاند و با نانوحبابهای رنگشده سبز (لیپوزومها) پر شدهاند. به این ترتیب می توان آنها را به صورت جداگانه با روش جدید تصویربرداری اپتوآکوستیک شناسایی کرد. محققان از میکرورباتهایی با اندازه های ۵ تا ۲۰ میکرومتر استفاده کردند. کوچکترین رباتها به اندازه گلبول های قرمز خون هستند که ۷ تا ۸ میکرومتر قطر دارند. این اندازه باعث میشود میکرورباتهایی که به صورت داخل وریدی تزریق میشوند، حتی از نازکترین ریزمویرگهای مغز موش عبور کنند. محققان همچنین یک فناوری توموگرافی اپتوآکوستیک اختصاصی توسعه دادند تا در واقع رباتهای کوچک را یک به یک با وضوح بالا و در زمان واقعی شناسایی کنند. این روش تصویربرداری منحصربهفرد تشخیص رباتهای کوچک را در نواحی عمیق و صعب العبور بدن و مغز ممکن میسازد، چیزی که با میکروسکوپ نوری یا هر روش تصویربرداری دیگری امکانپذیر نبود. این روش اپتوآکوستیک نامیده می شود زیرا نور ابتدا توسط بافت مربوطه جذب می شود. سپس جذب امواج اولتراسوند کوچکی تولید می کند که می تواند شناسایی و تجزیه و تحلیل شود تا به تصاویر حجمی با وضوح بالا منجر شود.
برای اینکه ریزربات ها در تصاویر بسیار قابل مشاهده باشند، محققان به ماده کنتراستدهنده مناسب نیاز داشتند. بنابراین، آنها برای مطالعه خود از میکرورباتهای کروی مبتنی بر ذرات سیلیکا استفاده کردند. این نوع ربات طراحی بسیار قوی دارد و برای کارهای پیچیده پزشکی واجد شرایط بسیار خوبی است.
رازانسکی توضیح می دهد: «طلا یک عامل کنتراستدهنده بسیار خوب برای تصویربرداری اپتوآکوستیک است.» علاوه بر طلا، محققان استفاده از حبابهای کوچکی به نام نانولیپوزومها را نیز آزمایش کردند که حاوی رنگ سبز فلورسنت بود که به عنوان ماده کنتراست نیز عمل میکرد. ورده از محققان این پروژه میگوید: «لیپوزومها همچنین این مزیت را دارند که میتوانید آنها را با داروهای قوی پر کنید، که برای رویکردهای آینده به دارورسانی هدفمند مهم است. کاربردهای بالقوه لیپوزوم ها در یک مطالعه بعدی بررسی خواهد شد.»
علاوه بر این، طلا همچنین اجازه می دهد تا اثر سیتوتوکسیک پوشش نیکل را به حداقل برسانید.در هر صورت، اگر در آینده قرار است میکرورباتها در حیوانات یا انسان های زنده کار کنند، باید زیست سازگار و غیرسمی شوند، که بخشی از یک تحقیق در حال انجام است.
در مطالعه حاضر، محققان از نیکل به عنوان یک محرک مغناطیسی و یک آهنربای دائمی ساده برای کشیدن ربات ها استفاده کردند. در مطالعات بعدی، آنها می خواهند تصویربرداری اپتوآکوستیک را با دستکاری های پیچیده تر با استفاده از میدان های مغناطیسی دوار آزمایش کنند.