یک گروه از فیزیکدانان در دانشگاه آکسفورد در انگلیس، روبات مولکولی طراحی کرده است که میتوان آن را برای حرکت در مسیرهای مستقیم شاخهدار برنامهریزی کرد. امکان چنین کنترلی تاکنون وجود نداشته است، زیرا افزارههای قبلی قادر بودند که فقط در خط مستقیمی رو به جلو حرکت کنند. این نانوروبات را میتوان در کاربردهایی مانند ماشینهای مولکولی نسل آینده یا برای جابهجایی محمولههایی نظیر داروها، استفاده کرد.
حرکت کنترل شده نانوروباتها
| یک گروه از فیزیکدانان در دانشگاه آکسفورد در انگلیس، روبات مولکولی طراحی کرده است که میتوان آن را برای حرکت در مسیرهای مستقیم شاخهدار برنامهریزی کرد. امکان چنین کنترلی تاکنون وجود نداشته است، زیرا افزارههای قبلی قادر بودند که فقط در خط مستقیمی رو به جلو حرکت کنند. این نانوروبات را میتوان در کاربردهایی مانند ماشینهای مولکولی نسل آینده یا برای جابهجایی محمولههایی نظیر داروها، استفاده کرد. |

|
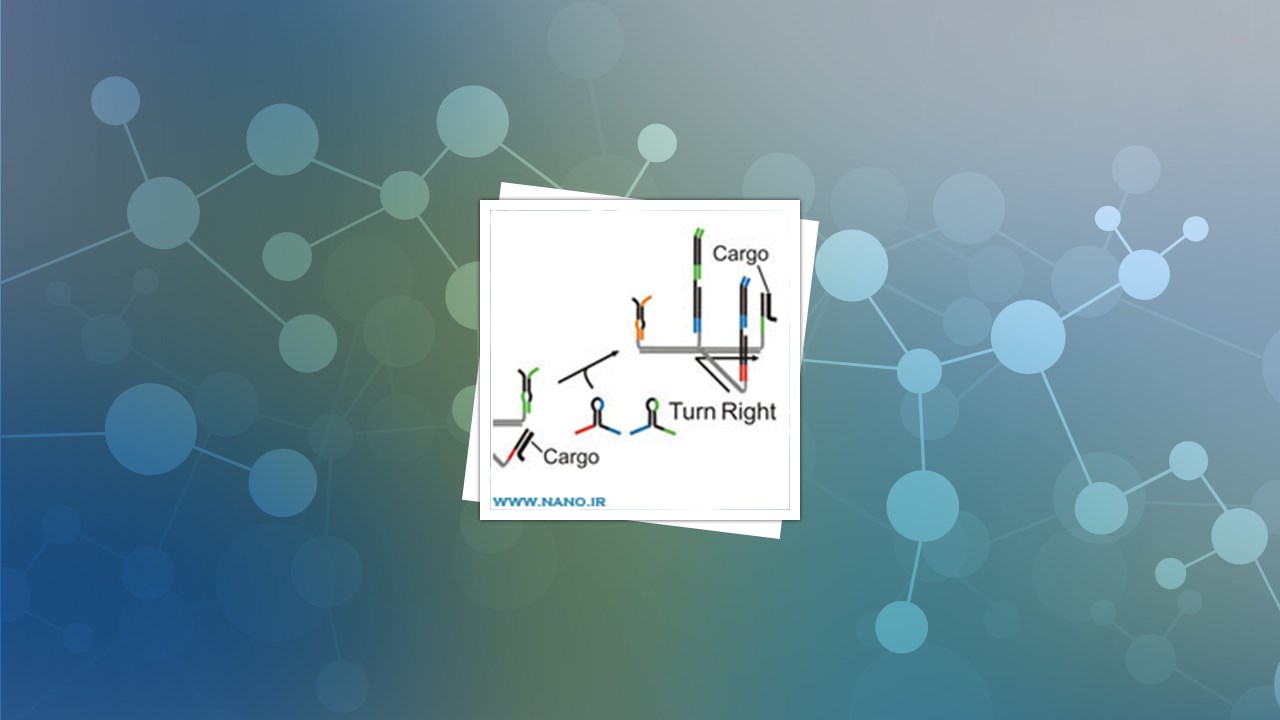
| برنامهریزی یک نانوربات برای حرکت کردن. |
| آندریو تربرفیلد و همکارانش با طراحی نانوروباتی که میتواند به عقب و جلو حرکت کرده و برای حرکت در مسیرهای مستقیم شاخهدار برنامهریزی شود، قدم بزرگی در زمینه ساخت نانورباتها برداشتهاند. این افزاره جدید، برخلاف موتورهای دوپدالی قبلی، فقط یک پا (ساخته شده از DNA سنتزی) دارد که به مسیر نانومقیاسِ ساخته شده از ستون فقرات DNA دو رشتهای، متصل شده است. این ربات با برداشتن گامهای کوچک که شامل اتصال پایش به ستون فقرات DNA و جدا شدن آن از این ستون است، پیادهروی میکند. سوخت این ماشین، رشتههایDNA هستند که آن را به جلو هل میدهند. ریچارد موسکات، عضو این گروه، توضیح میدهد که این ربات و مسیر حرکتش با رشتههای DNA سوخت برای جدا کردن این روبات مولکولی از یک مکان و سپس حرکت موسکات میگوید که تحقیق قبلی نشان داد که میتوان ماشین مولکولی ساخت که این گروه تحقیقاتی اکنون تلاش میکند که مسیرهای طولانیتر برای حرکت این این محققان جزئیات نتایج کار تحقیقاتی خود را در مجلهی Nano Letters منتشر |