محققان مؤسسه ماکس پلانک رباتهای میکروسکوپی جلبکی با تواناییهای حرکتی شگفتانگیز ایجاد کردند. این جلبکهای مغناطیسی شده بهعنوان نانوروباتهای زیستی برای تحویل هدفمند دارو در محیطهای زیستی پیچیده قابل استفاده هستند.
ساخت شناگرهایی که از قهرمان المپیک سریعتر شنا میکنند!
یک تیم تحقیقاتی در مؤسسه ماکس پلانک برای سیستمهای هوشمند (MPI-IS) در اشتوتگارت موفق به توسعه میکروشناگرهای زیستی ترکیبی شده است که با پوششی از مواد مغناطیسی پوشیده شدهاند، اما توانایی شناگری آنها تقریباً بدون تغییر باقی مانده است. نتایج این پژوهش که توسط گروه هوش فیزیکی (Physical Intelligence) در MPI-IS انجام شده، در مجله Matter منتشر شده است.
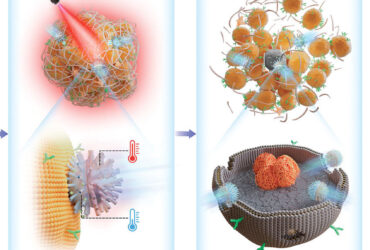
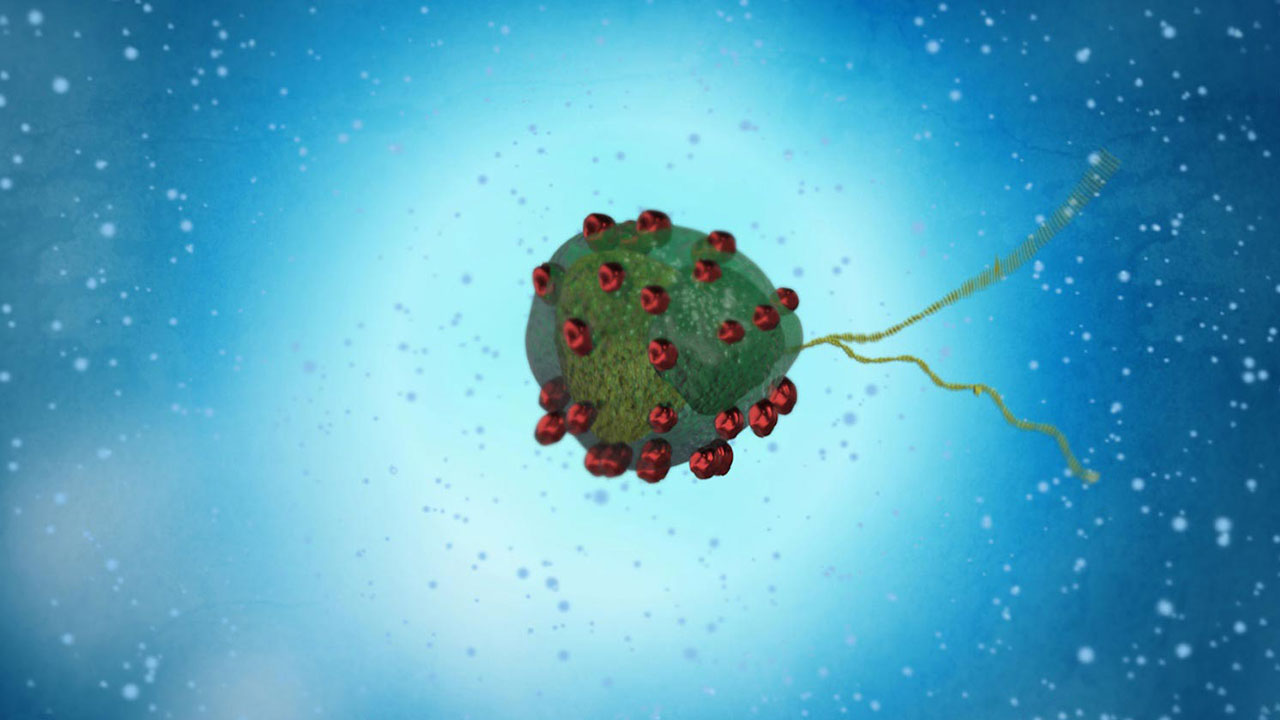
در طبیعت، جلبکهای تکسلولی با اندازهای در حدود ۱۰ میکرون به دلیل داشتن دو تاژک شلاقیشکل در قسمت جلویی، شناگران استثنایی هستند. اما پرسشی که مطرح بود این بود که اگر این جلبکها با یک لایه نازک از پلیمر طبیعی کیتوزان (برای چسبندگی بهتر) و نانوذرات مغناطیسی پوشانده شوند، آیا همچنان میتوانند با سرعت بالا حرکت کنند، از میان فضاهای تنگ عبور کنند و در محیطهای چسبناک با ویسکوزیتهای مشابه مخاط بدن شنا کنند؟
محققان دریافتند که این پوشش مغناطیسی تأثیر چندانی بر عملکرد حرکتی جلبکها ندارد. این نانوروباتهای زیستی با کمک تاژکهای خود که بهصورت حرکت شنای قورباغه عمل میکنند، همچنان میتوانند با سرعتی مشابه ۱۱۵ میکرومتر در ثانیه (تقریباً ۱۲ برابر طول بدن خود در هر ثانیه) حرکت کنند.
برای مقایسه این سرعت، در نظر بگیرید که سرعت یک شناگر المپیکی مانند مایکل فلپس تقریباً ۱.۴ برابر طول بدنش در هر ثانیه است، در حالی که جلبکها حتی پا هم ندارند!
این تیم تحقیقاتی توانست با استفاده از میدانهای مغناطیسی خارجی، مسیر حرکت جلبکهای پوشیدهشده با نانوذرات را کنترل کند.
مراحل آزمایش:
ابتدا، این میکروشناگرهای زیستی در یک مایع با ویسکوزیته مشابه آب آزمایش شدند. با قرار دادن آنها در یک محیط سهبعدی پرینتشده با موانع کوچک، مسیرهای حرکتیشان مورد بررسی قرار گرفت. سپس، تیم تحقیقاتی از دو سیستم مختلف (سیمپیچهای مغناطیسی و آهنرباهای دائمی) استفاده کرد تا میدان مغناطیسی یکنواختی ایجاد کرده و جهت آن را تغییر دهد.
بدون هدایت مغناطیسی، بسیاری از جلبکها در مسیرها گیر میکردند و مجبور بودند بازگردند. با کنترل مغناطیسی، این نانوروباتها مسیر خود را روانتر طی کرده و از برخورد با موانع اجتناب کردند.
به گفته “بیرگول آکولپوغلو”، یکی از محققان اصلی این پروژه، هدایت مغناطیسی به نانوروباتهای زیستی کمک کرد تا خود را با جهت میدان هماهنگ کنند، شبیه به داشتن یک GPS کوچک برای حرکت در محیطهای بسته!
برای شبیهسازی شرایط واقعیتر، پژوهشگران ویسکوزیته مایع را افزایش داده و مجدداً این میکروسویمرها را آزمایش کردند.
افزایش ویسکوزیته حرکت جلبکها را کندتر کرد و مسیر شنای آنها را تغییر داد. با اعمال میدان مغناطیسی، شناگران حرکات نوسانی (زیگزاگی) انجام داده و همچنان به حرکت خود ادامه دادند.
به گفته “سعادت فاطما بالتاجی”، محقق دیگر این پروژه، این مطالعه نشان میدهد که با تنظیم دقیق ویسکوزیته محیط و کنترل مغناطیسی، میتوان حرکت این نانوروباتها را در محیطهای پیچیده بهینه کرد.